1. Executive Summary & Overview
A suspension system is a crucial part of any vehicle, connecting the wheels to the chassis and controlling motion for a smooth and stable ride. While traditional suspension systems rely on springs, hydraulics, or compressed air, modern automotive designs demand active damping capabilities.
This project presents a conceptual study and basic model of a Magnetic Suspension System, which utilizes controlled electromagnetic forces to levitate, guide, and stabilize a vehicle platform without physical contact.
2. Suspension Systems Comparison
Vehicle suspension technologies have evolved from basic passive dampers to fully active systems:
- Traditional Systems:
- Spring-based: Uses mechanical steel coils or leaf springs (passive).
- Hydraulic: Dampens vibrations by pushing fluid through small orifices.
- Air suspension: Adjusts ride height using pressurized air bellows (semi-active).
- Modern Systems:
- Active and Semi-active: Adjusts damping coefficients in real-time based on road inputs.
- Adaptive Suspension: Constantly adjusts using valves to match road profile.
- Magnetic Suspension: Utilizes electromagnetic fields and adjustable magnetic forces for a frictionless, highly controlled, and smooth ride.
3. Electromagnetic Principles & Control
The system relies on fundamental electromagnetic principles to maintain dynamic stability:
- Magnetic Levitation (Maglev): Leverages opposing magnetic fields to create contactless levitation, minimizing friction.
- Electromagnetic Fields: By adjusting the coil current, the system modulates the magnetic flux density, allowing precise force control.
- Height Regulation & Opposing Force: The system continuously adjusts the current to generate an opposing force that matches the payload weight and compensates for external disturbances, maintaining a constant air gap.
4. Design Concept Visual
The mechanical layout and magnetic assembly of the suspension concept are illustrated below:
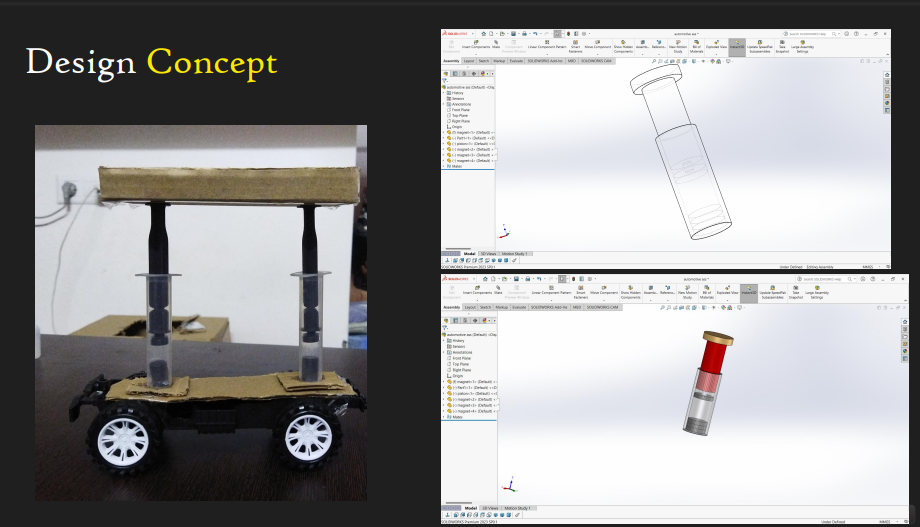 Figure 1: CAD assembly layout of the active magnetic suspension
concept
Figure 1: CAD assembly layout of the active magnetic suspension
concept
(This is just a basic illustration with permanent magnets, not the final design. It was created to illustrate how magnetic suspension system would be, later this project was showcased in our automotive Laboratory)
5. System Performance & Characteristics
Like any advanced powertrain or chassis component, active magnetic levitation presents unique trade-offs:
| Advantages | Disadvantages |
|---|---|
| Frictionless movement: Eliminates mechanical wear and tear. | High cost: Expensive materials (rare-earth magnets) and sensors. |
| Improved ride quality: Ultra-fast response times to road bumps. | Complexity: Requires advanced controller loops and sensors. |
| Lower maintenance costs: No mechanical joints or seals to fail. | Power dependence: Failure of power supply disables active damping. |
| High speed potential: Smooth stabilization enables higher cornering speeds. | Weight: Electromagnetic coils add unsprung mass. |
6. History & Current Applications
Magnetic levitation and active damping concepts have matured over decades of industrial usage:
- Early Concepts (1900s): The first magnetic levitation patents were filed in the early 20th century for transport systems.
- Maglev Train (1970s): The development of high-speed passenger rail systems proved the feasibility of contactless levitation.
- Industrial Applications: Electromagnetic bearings became standard in high-speed turbines and precision machinery.
- Modern Automotive Use: Semi-active magneto-rheological dampers are now widely deployed in high-performance sports cars.
7. Future Scope & Development
Active electromagnetic levitation opens new possibilities for modern mobility:
- Transportation: Expanded deployment in urban mass transport and heavy cargo networks.
- Industrial Innovations: Vibration isolation in cleanrooms, aerospace assembly facilities, and drones.
- Consumer Automotive: Wider integration into standard electric vehicles as controller costs decrease.
- Energy Efficiency: Eliminating mechanical friction reduces energy loss, boosting EV battery range.